
Vysávač robot nie je ten, čo vysáva v krčme od rána do večera, ale je to taká mašinka, ktorá si chodí po byte alebo inom uzavretom priestore, vysáva prach a pritom si dáva pozor, aby vám nezhodil lampu zo stola, prípadne sám nespadol zo schodov. Ten môj, keďže mal v pláne používať inteligenciu, sa mal orientovať v priestore a mal si aj presne pamätať, čo už povysával a čo ešte nie.
Myšlienka to bola pekná. Postaviť vysávač, ktorý vpustíte do bytu, pootvárate mu všetky dvere a je povysávané.
Ale poďme pekne po poriadku. Prvotná myšlienka vznikla pred mnohými rokmi pri nezáväznej debate ešte s bývalým kolegom, odborníkom na umelú inteligenciu. Rozprával mi o úlohách, aké je možné riešiť za pomoci umelej inteligencie. Vtedy som ešte poriadne ani nechápal o čom to je a nechápem to vlastne dodnes. Napriek tomu som sa podujal k tomu, že to vyskúšam. A tak nasledovalo more prebdených nocí. Výsledkom bol projekt, ktorý už dávno leží v skrini, zapadnutý prachom. A aby z neho bol aspoň nejaký úžitok, rozhodol som sa vás s týmto projektom trošku viac oboznámiť. Snáď sa medzi čitateľmi nájde aspoň jeden, ktorého to zaujme a čas investovaný mnou do tohto projektu tak prinesie aspoň chabý úžitok.
Na začiatku projektu boli položené požiadavky:
Zostrojiť robota – automatický vysávač, ktorý sa dokáže zorientovať v miestnosti plnej nábytku a dokáže si rozvrhnúť trasu vysávania tak, aby povysával plochu miestnosti po čo najkratšej trase. Mozgom robota mal byť ľubovoľný PC s Windows XX. Do podrobností nebudem zachádzať.
Na orientáciu robota v priestore malo slúžiť jednoduché laserové odmeriavacie zariadenie, ktoré vám chcem ďalej popísať. Základom odmeriavacieho zariadenia bolo laserové ukazovátko a kvôli zníženiu ceny, jednoduchá USB WEB kamera.
Laser vysielal svetelný lúč, ktorý osvetľoval predmety v miestnosti a kamera vybavená dômyselným systémom vyhľadávania, hľadala osvetlené miesto a z uhla, pod akým dopadal odrazený lúč svetla na čip kamery, počítač následne vypočítal vzdialenosť robota od prekážky. Ako sa robot pohyboval po miestnosti, tak si takýmto spôsobom získaval informácie o rozmiestnení prekážok (predmetov) v miestnosti. Tým si postupne utváral kompletnú mapu miestnosti, a teda aj samotného priestoru, v ktorom sa môže pohybovať. Výsledná presnosť takto skonštruovaného snímača vzdialenosti bola vzhľadom na skutočnosť, že celý snímač bol vyrobený na kolene v obývacej izbe panelákového bytu, prekvapujúca. Na vzdialenosti 1 m bola presnosť cca +/- 1 cm, čo bolo pre experiment úplne postačujúce.
Robot mal ďalej inkrementálne snímanie prejdenej dráhy vyrobené z pokazenej myši, takže keď sa pohyboval po miestnosti, mapa, ktorú si vytváral, vyzerala zhruba nasledovne:
Červené body na obrázku znázorňujú odraz svetelného lúča lasera zaznamenaný kamerou. Čierna čiara znázorňuje obrys predmetov, ktoré mal robot pred sebou vo výhľade. A obdĺžnik s dvomi kruhmi znázorňuje okamžitú polohu robota, pričom väčší kruh znázorňuje predok robota.
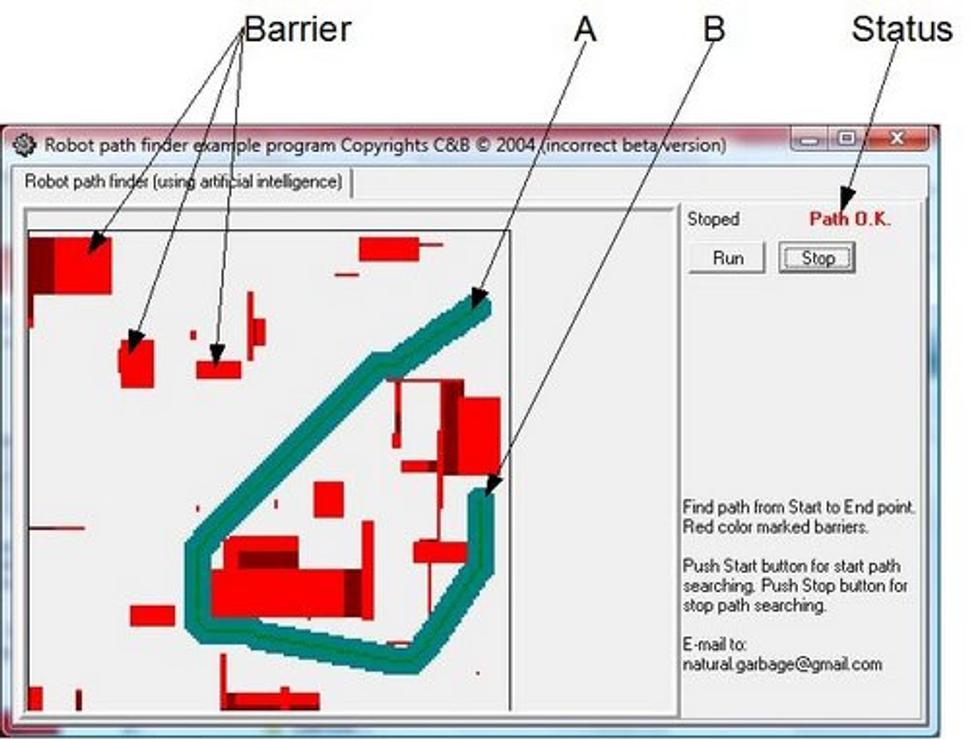
Už zostáva len "maličkosť", a to poslať robota „správnym smerom“. O to sa mal starať inteligentný navigačný systém. Medzi základné prvky navigačného systému patril vyhľadávač trasy, ktorého úlohou bolo nájsť v miestnosti medzi prekážkami voľnú trasu pre prechod robota z bodu A do bodu B. Vyhľadávač trasy používa prvky umelej inteligencie na nájdenie správnej trasy. Ako ukážku pripájam nedokončený testovací program (občas "zamrzne" a je nutný reštart programu). Ak je nájdená trasa pre robota priechodná, program v statuse zobrazí „Path O.K.“. Pokiaľ trasa nie je priechodná, program v statuse zobrazí „Bad path“. Tlačítkom „Run“ sa automaticky vytvorí mapa miestnosti s náhodne rozmiestnenými prekážkami (Barrier's) a náhodne sa vytvoria aj dva body „A“ a „B“. Úlohou programu je nájsť najkratšiu cestičku medzi prekážkami z bodu A do bodu B.
Ospravedlňte, prosím, chyby v popisoch.
Malý ukážkový program si záujemcovia môžu stiahnuť.
Vyhľadávač trasy nemusí byť vždy stopercentne úspešný. Niekedy sa mu podarí nájsť trasu iba po veľmi dlhej dobe a v niektorých zložitých situáciách sa mu nemusí podariť nájsť správnu trasu vôbec. Ide len o testovaciu (ladiacu) verziu, ktorá má ešte chyby. Program je nutné ešte dopracovať. Bohužiaľ z časových dôvodov som sa už k tomu nedostal, aj keď nápady na vylepšenie určite nejaké v hlave ešte sú. Keď som pred rokmi ukončil prácu na robotovi, pracoval som práve na tejto časti. Takže táto časť projektu už zostala nedotiahnutá. Mal som niekoľko dôvodov na ukončenie práce na projekte, ale medzi tie najdôležitejšie patril nedostatok voľného času a aj to, že NASA práve v tom čase poslala na Mars robot Pathfinder, čím ma naviedla na iné lepšie riešenie celého problému. Čo by ale znamenalo začať úplne od nuly.
Ďalšou časťou mala byť automatická navigácia robota v priestore s optimalizáciou prejdenej dráhy tak, aby robot vysával určenú plochu po čo najkratšej dráhe. K tejto časti som sa už z časových dôvodov nedostal.
Dúfam, že sa medzi vami našiel aspoň jeden človek, ktorý príspevok dočítal až sem. Že ho zaujala aspoň jedna z mojich myšlienok. A verím, že lenivosť i naďalej zostane hnacou silou pokroku a že sa už v blízkej dobe nájde niekto, kto vyrobí i pre širokú verejnosť cenovo dostupný automatický vysávač.
Dodatok autora: Text tohto článku som napísal už pred niekoľkými rokmi, v čase, keď jediný, mne známy inteligentný robotický vysávač vyrábala firma Dyson, ktorá ho krátko na to prestala predávať. Odvtedy sa, vďaka ľudskej lenivosti, situácia na trhu dramaticky zmenila.






